TARE RSS
0.论文链接
1. 论文背景
- 本文主要是提出一种机器人运动路径的自我探索方法
- 如何优化了整体探索路径与路径长度的关系,得到运动学可行局部路径
2. 研究思路
利用全局表示来规划路径,对于规划的路径进行详细的探索,将局部最优路径和全局路径两层路径重叠组合来确定,追求整体最优解而非即时奖励的最大化。利用递归和随机取样——最小视点集。
将空间分为自由空间和非自由空间,非自由空间分为自占据空间和未知空间。在线实时更新未覆盖面,在给定的未覆盖面和当前视点来看找一系列的视点来满足条件。
算法概念如下:
- 先进行视点采样进行选点,并将所选的点进行迭代。
- 迭代式预选三个视点来进行局部最短路径的探索,并将局部与全局路径连接 —— (分步思想)
- 奖励与概率成正比,当奖励可以忽略时,采样结束,找到局部成本最低的路径
- 考虑到机器人的运动学和动力学需求,要改进平滑路径
- 利用 TSP 来分段和重整平滑段,只对相邻点的样条进行优化
- 用 T_{local} 代替 T_{global} 。
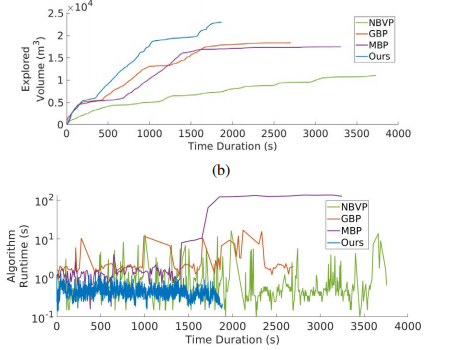
3. 实验结果
- 实验优化的结果显著

4. 创新点和不足
- 创新点:
- 在探索的过程中,选取视点进行分段处理,将一个整体的最优路径改为一段段的局部路径之和,并且在每一段的连接过程中考虑运动学特性,并且不断迭代和优化
- 在探索的过程中采用贪心的思想,每次只看一个视点,减少了时间复杂度
- 不足:
- 采用 TSP 思想选取视点,在解决 TSP 问题上的算法的运算占最大的比重
- 迭代预选的三个点是随机选取的,对于迭代时间复杂度的影响较大
5. 个人想法
- 在路径规划时的分段思想和迭代优化思想值得借鉴
- 贪心思想来减小复杂度的思想可以借鉴
会后补充
- 一边维护,一边优化
- 分层化
- 局部优化还需要考虑

0 条评论